ZLTECH 24V-36V 5A DC ไฟฟ้า Modbus RS485 ตัวควบคุมไดรเวอร์มอเตอร์แบบไม่มีแปรงสำหรับ AGV


















ฟังก์ชั่นและการใช้งาน
1 โหมดปรับความเร็ว
การควบคุมความเร็วอินพุตภายนอก: เชื่อมต่อเทอร์มินัลคงที่ 2 ตัวของโพเทนชิออมิเตอร์ภายนอกเข้ากับพอร์ต GND และพอร์ต +5v ของไดรเวอร์ตามลำดับเชื่อมต่อปลายการปรับเข้ากับปลาย SV เพื่อใช้โพเทนชิออมิเตอร์ภายนอก (10K~50K) เพื่อปรับความเร็ว หรือผ่านหน่วยควบคุมอื่นๆ (เช่น PLC, ไมโครคอมพิวเตอร์แบบชิปเดี่ยว และอื่นๆ) ป้อนแรงดันไฟฟ้าแบบอะนาล็อกไปยังปลาย SV เพื่อให้ได้การควบคุมความเร็ว (เทียบกับ GND)ช่วงแรงดันไฟฟ้าที่ยอมรับได้ของพอร์ต SV คือ DC OV ถึง +5V และความเร็วของมอเตอร์ที่สอดคล้องกันคือ 0 ถึงความเร็วที่กำหนด
2 การควบคุมการเดิน/หยุดมอเตอร์ (EN)
การทำงานและการหยุดของมอเตอร์สามารถควบคุมได้โดยการควบคุมการเปิดและปิดของเทอร์มินอล EN เทียบกับ GNDเมื่อขั้วเป็นสื่อกระแสไฟฟ้า มอเตอร์จะทำงานมิฉะนั้นมอเตอร์จะหยุดทำงานเมื่อใช้เทอร์มินอลรัน/สต็อปเพื่อหยุดมอเตอร์ มอเตอร์จะหยุดเองตามธรรมชาติ และกฎการเคลื่อนที่ของมอเตอร์จะสัมพันธ์กับความเฉื่อยของโหลด
3 การควบคุมมอเตอร์เดินหน้า/ถอยหลัง (F/R)
ทิศทางการทำงานของมอเตอร์สามารถควบคุมได้โดยการควบคุมการเปิด/ปิดของเทอร์มินอล F/R และเทอร์มินอล GNDเมื่อ F/R และเทอร์มินอล GND ไม่นำไฟฟ้า มอเตอร์จะทำงานตามเข็มนาฬิกา (จากด้านเพลามอเตอร์) มิฉะนั้น มอเตอร์จะทำงานทวนเข็มนาฬิกา
4 ไดรเวอร์ล้มเหลว
เมื่อแรงดันไฟเกินหรือกระแสเกินเกิดขึ้นภายในไดรเวอร์ ไดรเวอร์จะเข้าสู่สถานะการป้องกันและหยุดทำงานโดยอัตโนมัติ มอเตอร์จะหยุด และไฟสีน้ำเงินบนไดรเวอร์จะดับลงไดรเวอร์จะส่งเสียงเตือนเมื่อเทอร์มินัลการเปิดใช้งานถูกรีเซ็ต (เช่น EN ถูกตัดการเชื่อมต่อจาก GND) หรือปิดเครื่องเมื่อเกิดข้อผิดพลาดนี้ โปรดตรวจสอบการเชื่อมต่อสายไฟกับมอเตอร์หรือโหลดมอเตอร์
5 พอร์ตสื่อสาร RS485
โหมดการสื่อสารของไดรเวอร์ใช้โปรโตคอล Modbus มาตรฐาน ซึ่งเป็นไปตามมาตรฐานแห่งชาติ GB/T 19582.1-2008การใช้การสื่อสารแบบลิงก์อนุกรม 2 สายที่ใช้ RS485 อินเทอร์เฟซทางกายภาพใช้พอร์ตการเดินสายแบบ 3 พินแบบเดิม (A+, GND, B-) และการเชื่อมต่อแบบอนุกรมนั้นสะดวกมาก
พารามิเตอร์
| คนขับรถ | ZLDBL4005S |
| แรงดันไฟฟ้าขาเข้า (V) | 24V-36V DC |
| กระแสไฟขาออก (A) | 5 |
| วิธีการควบคุม | โมบัส RS485 |
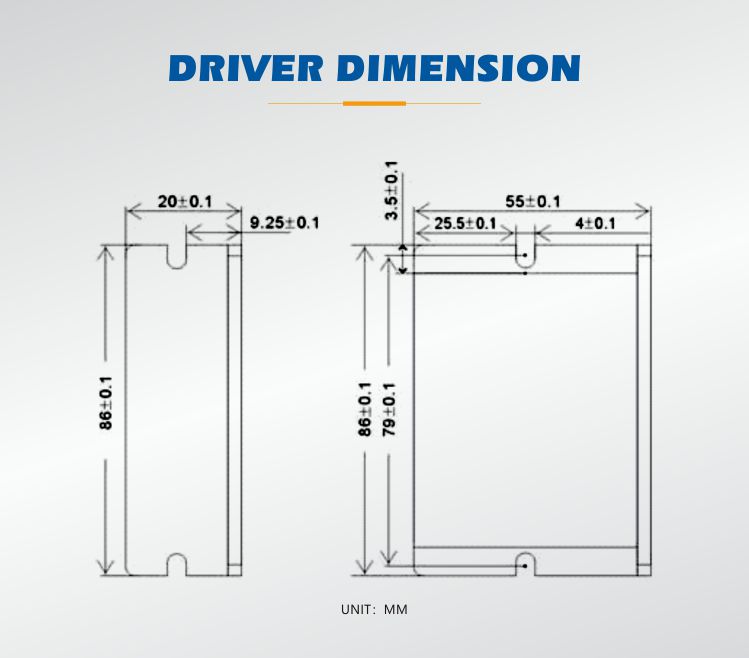
| ขนาด (มม.) | 86*55*20มม |
| น้ำหนัก (กิโลกรัม) | 0.1 |
มิติ
แอปพลิเคชัน

การบรรจุ

อุปกรณ์การผลิตและการตรวจสอบ

คุณสมบัติและการรับรอง

สำนักงานและโรงงาน

ความร่วมมือ

หมวดหมู่สินค้า
-

2S86 ZLTECH 86 series DC 36V 48V AC 27V-75V ปิด...
-

ZLTECH 24V-48V 30A Canbus Modbus ช่องสัญญาณคู่ D...
-

ZLTECH 15inch 200kg DC brushless hub motor with...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V แบบบูรณาการ step...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 57mm Nema23 สเต็ปมอเตอร์ในตัวพร้อม d...





