ZLTECH 160 มม. รับน้ำหนัก 400 กก. อัตราทดเกียร์ 16~70




ข้อดี
ในกระบวนการจัดการ เพื่อให้แน่ใจว่า AGV สามารถจัดการงานได้สำเร็จ ในการลดความเร็วของไดรฟ์ขอบล้อ การบังคับเลี้ยว การขึ้นแม่แรง หรือการดำเนินการซ้ำๆ เพื่อให้ได้ความผิดพลาด ผู้ผลิตมักจะใช้ตัวลดเพื่อให้แน่ใจว่าตำแหน่งถูกต้องและวางตำแหน่งซ้ำๆ ความแม่นยำของ AGVและนอกเหนือจากการรักษาความแม่นยำแล้ว เกียร์ยังสามารถเพิ่มแรงบิดเอาต์พุตโดยไม่ต้องเปลี่ยนกำลังของเซอร์โวมอเตอร์ ซึ่งจะเป็นการเพิ่มความสามารถในการยึดเกาะของ AGV
ล้อทดรอบนี้มีลักษณะที่เงียบ ประสิทธิภาพสูง และอื่นๆ แต่ยังมีข้อดีของความแตกต่างของการคืนตัวเล็กน้อยและความแม่นยำสูง ดังนั้นจึงสะดวกกว่าในการพกพาระบบควบคุมวิถีการเคลื่อนที่ของ AGV ในการทำงานนอกจากนี้ โหมดการหมุนเอาต์พุตของผลิตภัณฑ์นี้คือการหมุนของเปลือก ไม่หลุดง่าย และเพิ่มเสถียรภาพในการหมุนและความสามารถในการรับน้ำหนักที่สำคัญกว่านั้น การจับคู่ของล้อทดรอบมีความแข็งแรงมาก และเซอร์โวมอเตอร์หรือแหล่งพลังงานแบบหมุนที่เหมาะสมอื่นๆ สามารถบรรลุความร่วมมือที่สมบูรณ์แบบ
พารามิเตอร์
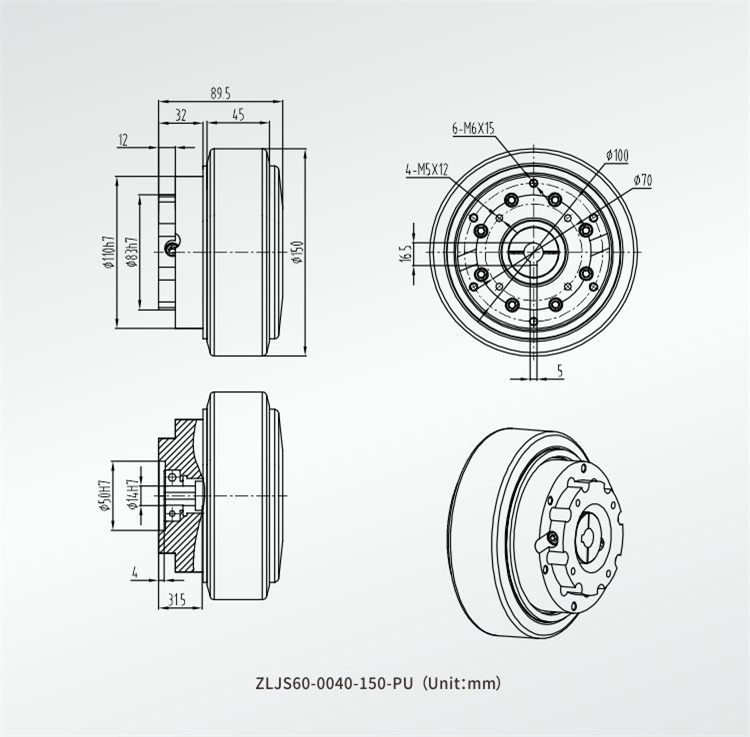
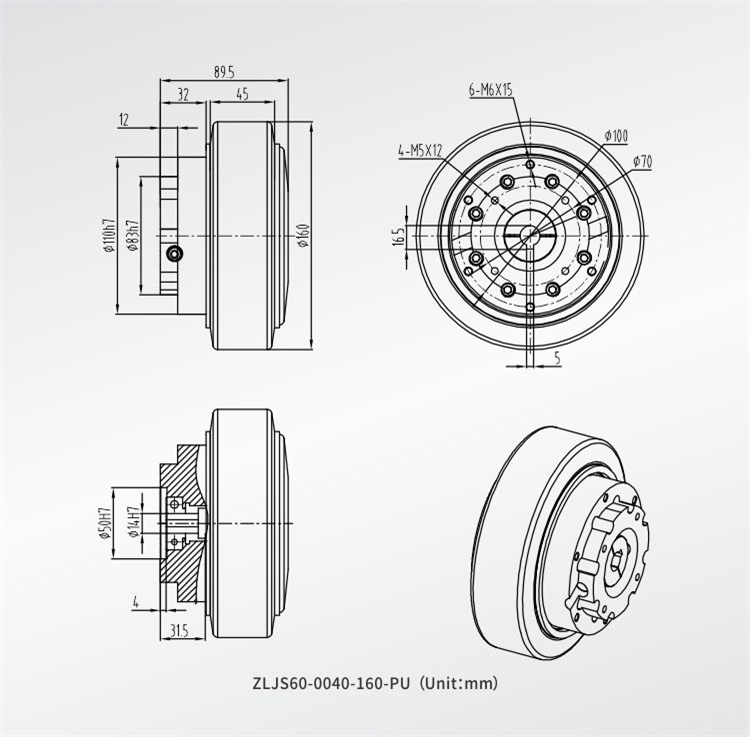
| รุ่นล้อลด | ZLLS60-0040-150-PU | ZLLS60-0040-160-PU |
| อัตราส่วนความเร็วลด (i) | 16/20/25 | 16/20/25 |
| ลดแรงบิด (Nm) | 30/33/33 | 30/33/33 |
| โพลียูรีเทนรับน้ำหนัก (กก.) | 400 | 400 |
| ความแข็ง (A) | 90±5 | 90±5 |
| ความเร็วสูงสุด (ม./นาที) | 88.3/70.7/56.5 | 94.2/75.4/60.3 |
| แรงฉุด (N) | 243.8/304.8/381.0 | 228.6/285.8/357.2 |
| น้ำหนักลากจูง (กก.) อ้างอิง | 463.3/579.1/723.9 | 434.3/542.9/678.7 |
| น้ำหนัก (กิโลกรัม) | 5 | 5 |
มิติ
แอปพลิเคชัน
มอเตอร์กระแสตรงไร้แปรงถ่านถูกนำมาใช้อย่างแพร่หลายในการผลิตอุปกรณ์อิเล็กทรอนิกส์ อุปกรณ์ทางการแพทย์ อุปกรณ์บรรจุภัณฑ์ อุปกรณ์โลจิสติกส์ หุ่นยนต์อุตสาหกรรม อุปกรณ์ไฟฟ้าโซลาร์เซลล์ และระบบอัตโนมัติอื่นๆ

การบรรจุ

อุปกรณ์การผลิตและการตรวจสอบ

คุณสมบัติและการรับรอง

สำนักงานและโรงงาน

ความร่วมมือ

หมวดหมู่สินค้า
-

ZLTECH 24V-48V 30A Modbus RS485 DC ไดร...
-

ZLTECH หุ่นยนต์ 8 นิ้ว 300 กก. BLDC ฮับมอเตอร์ engi...
-

ZLTECH Nema24 200/400W 24-48VDC เอ็นโค้ดเดอร์ เซอร์โว ม...
-

ZLTECH 9.5 นิ้ว 48V 20N.m ฮับมอเตอร์สำหรับ agricult...
-

ZLTECH Nema24 24V-48V 200/400W 3000RPM DC เข้ารหัส...
-
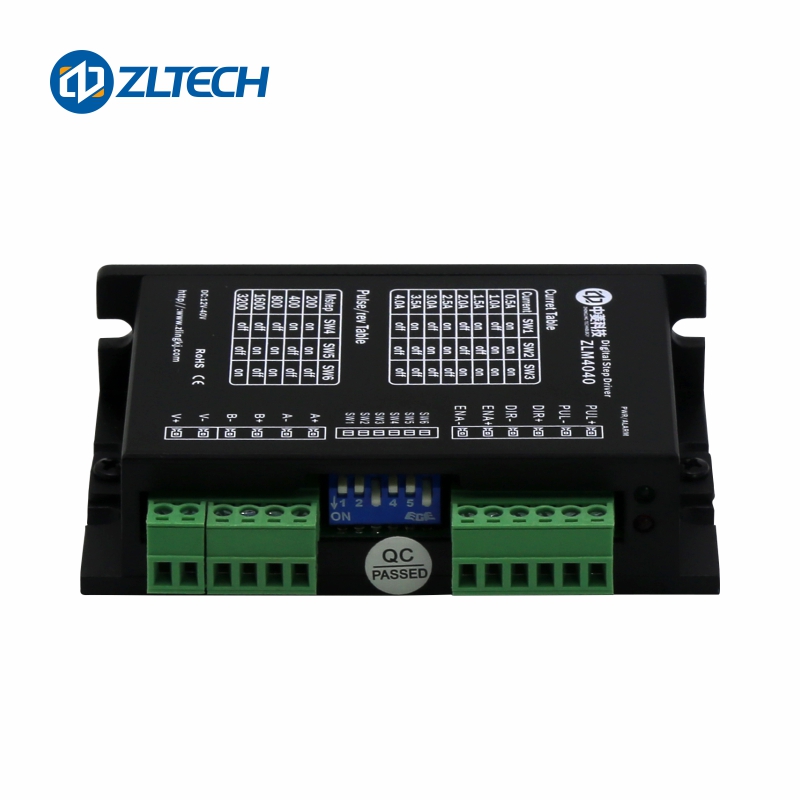
M4040 ZLTECH 2 เฟส 12V-40V DC 0.5A-4.0A บรัช...





